
Overview:
What if we want to detect an anonymous object in our surrounding and track it.Balltracker robot does the same work.But it is specialised for tracking and following only ball or any round shape object in its surrounding.On large scale, if we want to follow automatically a specific object then this can be used.What if the wheel chair which is used by physically chalenged people automatically follows required object to reach at target,at that place this project can be helpful.
What if we want to detect an anonymous object in our surrounding and track it.Balltracker robot does the same work.But it is specialised for tracking and following only ball or any round shape object in its surrounding.On large scale, if we want to follow automatically a specific object then this can be used.What if the wheel chair which is used by physically chalenged people automatically follows required object to reach at target,at that place this project can be helpful.


|
Working Principle:
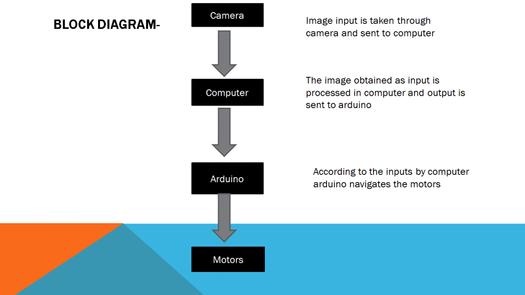
1. Capturing of image : Series of Images or video is captured through camera, which is mounted on board of ball tracking robot .In these captured images some peculiarity of interested object with respect to its surroundings is observed (as unicolored ball in our case). 2. Processing of image: Once particular feature of interested object is seen, it is processed for further application.As in our Ball tracking used the peculiar feature of unicolored ball with respect to its surrounding to detect it in real time and output is generated.This image is processed in laptop/pc or any other processor such as Rasberrypi. 3. Orders to actuators: Now with the output obtained from processing of image from laptop/pc is used to control the motor.Thus desired operation can be performed. |
Softwares :
Ubuntu Operating System
OpenCv (Image processing Library).
Codeblocks or any editor in ubuntu.
Arduino IDE installed in Ubuntu.
Ubuntu Operating System
OpenCv (Image processing Library).
Codeblocks or any editor in ubuntu.
Arduino IDE installed in Ubuntu.

Hardware:
1. Chasis.
2.Two dc motors.
3.Arduino Uno or Mega.
4.One Servo motor.
5.Camera.
1. Chasis.
2.Two dc motors.
3.Arduino Uno or Mega.
4.One Servo motor.
5.Camera.
Block Diagram:

Applications:
1.For spying purposes.
2. In traffic signal, to detect number plates of vehicles crossing.
3.Autonomous security system using face detection.
4.Used in robotics where it can act as eyes of human beings.
1.For spying purposes.
2. In traffic signal, to detect number plates of vehicles crossing.
3.Autonomous security system using face detection.
4.Used in robotics where it can act as eyes of human beings.
DEMO :
TEAM MEMBERS :
1. Gaurav Charpe
2. Anish Gupta
3. Pranav Atram
1. Gaurav Charpe
2. Anish Gupta
3. Pranav Atram
